🪴qql1's digital garden
Search
搜索
暗色模式
亮色模式
阅读模式
探索
Home
❯
笔记
❯
计算机知识
❯
操作系统
❯
电梯算法
电梯算法
2026年1月26日
1分钟阅读
发送POST请求-GET请求-(电脑-PC-桌面端-计算机)请求
(电脑-PC-桌面端-计算机)应用-软件-程序-app
文件-文档-txt文件-笔记
操作系统-
梗概
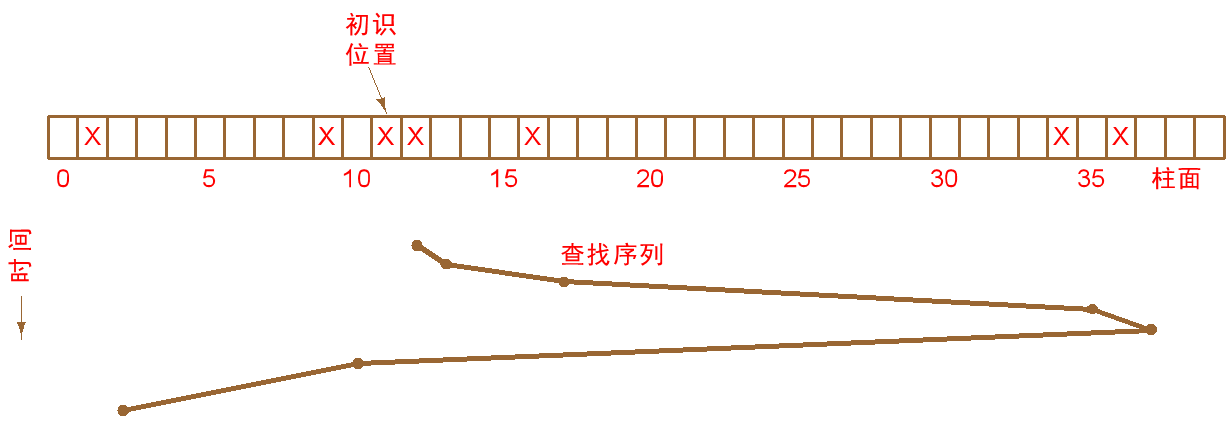
驱动程序维护一个当前方向位,先往这个方向的处理所有请求,再回头处理剩下的请求
优点:
移动磁臂的总次数的上界是固定的:柱面数的两倍。
实例
关系图谱
目录
梗概
优点:
实例
反向链接
磁盘臂调度